一、之前的学习笔记整理:
| 学习笔记 | 内容简述及收获心得 |
| RC振荡电路初学笔记(1) | 关于Jack·Kilby发明集成电路,并且这个电路是RC相移震荡电路的引子 |
| RC振荡电路初学笔记(2) | 关于Jack·Kilby发明集成电路的历史趣闻 |
| RC振荡电路初学笔记(3) | 罗列了几点RC相移电路中的个人困惑和备忘 |
| RC振荡电路初学笔记(4) | 对Jack·Kilby为什么使用PNP而非NPN做震荡电路做了些毫无根据的猜测 |
| RC振荡电路初学笔记(5) | 通过仿真软件对RC电路具体参数确定时的正确输出频率做了仿真 |
二、电容电流超前于电容电压的原因:
书上的解释是:只有对电容器充电之后,电容器内部有了电荷,电容器两端才有电压,所以流过电容器的电流是超前于电压的。如上的这个表述我是万分的无法理解和接受,电流和电压是同时产生的,怎么可能有谁超前、谁滞后的说法呢?
在物理世界中,电压与电流应该就是彼此同时产生、同时消失的,不会有电流超前于电压的“预知”能力(如果特别特别较真儿、我觉得也应该是先有电压才能驱动产生电流,但他们二者的因果时序近乎于瞬时,所以不能用可评估的时间去表述谁先谁后。所以无论如何也没有道理说出电流超前于电压这种话来)。更准确的表述应该是:电容器上的电压变化率引起了电容器上的电流产生,而电容器上的电压波形与电流波形在同个坐标系上比较,是相同的正弦波形,但相差着90°的相位差。
以最简单的一个理想电容器举例,图样就是一颗电容器画在纸面上:
这个时候电容器内部无论带有多少电荷,它的电荷量都不会随着时间发生变化,因而电容器上不会产生电流。当外部向电容器输入电荷、或者电容器向外部输出电荷时,随着电荷的增加或减小,电容器上同时的表现出了电压的波动和电流的产生。
因为电容器的电流 \(I_C = \frac{dQ}{dt} = C \frac{dV}{dt}\)
所以电流的波动和电压的波动是同时因为电荷的增减而同时引起的。
而又依然是通过上式可以看出来:在外部存在一个正弦电压施压在电容器上时,电容电压的变化频率就是电源电压的变化频率,所以电容电压 \(V_C = V_C^{max} sin(\omega t)\)
电容电流 \(I_C = C \frac{d}{dt} (V_C^{max} sin(\omega t)) = \omega C V_C^{max} cos(\omega t) = \omega C V_C^{max} sin(\omega t + \frac{\pi}{2})\)
此时就能看出来电容上的电压与电流相差90°的关系来了。
额外的,还可以用另一个更简单的解释来说明二者存在着90°的相位差。依然是通过观察电容器的电流 \(I_C = \frac{dQ}{dt} = C \frac{dV}{dt}\)。能够想到的是其中的电压V是个正弦波形态,那么在这个波形的极值点上的导数是0,所以这些极值点时对应的电流就是0,而在x轴过零交点上的导数最大(变化率最大),因而过零点时刻的电流最大。
上面这个关系说明了:电压最大时(正、负极值)、电流最小;电压最小(电压=0v)时的电容器充放电流最大。这与物理常识并不矛盾。电压最大时,在dt时间范围内电压却不再发生变化,所以没有电压的变化就没有电流;过零点虽然电容器上不存在电压,但是这个时候却是外界对它施压最大的时刻,最大的电压当然会获得最大的电流。
如上的解释,在我看来更准确一些。而且说明了结论:在电源输出正弦交流电、施压在电容器上时,电容器上的电流与电容器上的电压,是存在着90°的相位差;并且从数学的角度看待:电容器上的电流是超前于电容器上的自身电压、并且是超前90°相位角的。
三、RC相移角的计算方法:
有了电容器的电流超前于电压90°相位角的基础概念之后,就可以看RC相移器了。简单的一组RC相移器有RC滞后器和RC超前器两种组态:
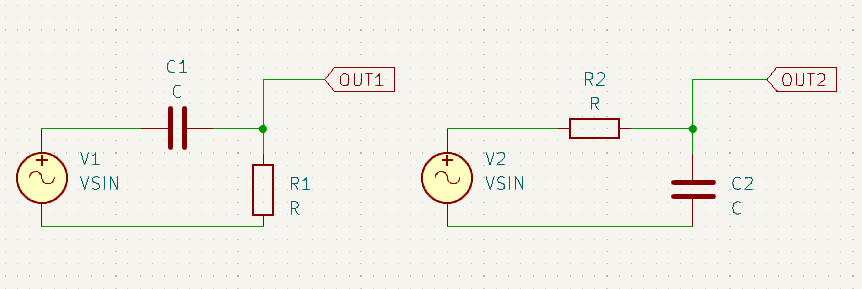
其中左图为超前器、右图为滞后器。这两种组态要讨论的是电压输入点和电压输出点的相位关系。它与上面提及的“电容器自身的电流与电压相位关系”不同,这里要讨论的是\(V_{in}\)和\(V_{out}\)二者的相位关系。
【todo 这里缺少容抗引起相位变化的进一步解释】
Jack·Kilby当年的电路使用的是滞后器网络,今天常见的则以超前器多为常见。索性我就罗嗦一些,分别将二者都罗列出来。实际上这二者只要理解一个,另外一个也就不言自明了。
先看左边的超前器,有两种计算方法可以计算出out点相对于in点的相位角。一种方法是简单且主流的阻抗复数计算法;另外一种则是不引入复数概念、纯粹依据欧姆定律进行微分方程求解。下面依次完成每一种方法的推敲:
- 3.1、超前器复数阻抗计算法;
- 3.2、超前器微分方程求解法;
- 3.3、滞后器复数阻抗计算法;
- 3.4、滞后器微分方程求解法;
3.1、超前器复数阻抗计算法:
因为out点相对于in点的相位角 \(\theta = arc tan \frac{阻抗虚部}{阻抗实部} = arc tan \frac{容抗值}{电阻数} = arc tan \frac{Z_R}{Z_C}\)
又因为电路中的阻抗 \(Z = Z_R + Z_C = R_R – jX_C\)
其中 \(R_R\)就是电阻的阻值,容抗则是 \(X_C = \frac{1}{\omega C}\)
将以上关系式联立即可求出相位角。这个计算方法简单,但并不直观。尤其是对于复数没有概念、或纵使对复数、容抗有概念却依然难以通过直观的电压、电流关系想清楚其中的客观物理原因。所以从思路上更简单的是下面使用的欧姆计算法。
3.2、超前器微分方程求解法:
抛弃复数的概念和容抗的思想,就只用中学物理的知识、即只是用欧姆定律,也是可以完成out点相对于in点相位角计算的,具体过程如下。
电源电压是完美的正弦输出(对于电源而言是输出、对于电路而言电源相当于输入点),那么电源电压就是随着时间不断变化的,它是时间t的函数,因而电源电压的函数式是:\(V_S = U_{in}(t) = U_{in}^{max} \cdot sin(\omega t)\)
输出点与输入点的电压是完全跟随的,只与输入点电压有2点不同:1、因为电路中的电阻形成的电压分压导致输出点电压存在压降;2、因为电容的容性特征引起的输出点电压的相位偏离。
压降的存在是一定的,这是通过欧姆定律就可以判断出来的。而相位偏离就是相位角,我们虽然知道它是存在的,但此时此刻以当前的推导思路而言并不能知道它的存在,所以先假设存在一个相位差,并将其设置成未知量,去设法求解这个位置量。如果求解出来是0,意味着并不存在这样的相位差;如果求解出其他数值,就意味着的确是存在相位差的。
在上面的想法引导下,写出out点的电压随时间函数 \(V_{out} = U_{out}(t) = U_C^{max} \cdot sin(\omega t + \theta)\)
上面的 \(U_C^{max}\) 和 \(\theta\) 都是不知道具体数值的,前者虽然不知道具体数值,但是肯定它是有、并且小于电源电压的;后者只是假设存在,要通过计算的出来看是否是0、或者是真实存在的。
依据欧姆定律,回路中电流时时处处相等。因而电流 \(I = I_R = I_C\)。又可以根据电容上的电流计算式完成电流的计算。电容上的电流 \(I_C = \frac{dQ}{dt} = C \frac{dV_C}{dt}\)。这个电流在回路中完成所有的电压降,因而根据基尔霍夫电压定律 \(U_S = U_R + U_C\) 就可以将以上所有关系式联立到一起。
带入关系式完成联立,最终得到:\(U_{in}^{max} \cdot sin(\omega t) = I_C R + U_C^{max} \cdot sin(\omega t + \theta)\)
带入的更进一步:\(U_{in}^{max} \cdot sin(\omega t) = RC \frac{d}{dt} (U_C^{max} \cdot sin(\omega t + \theta)) + U_C^{max} \cdot sin(\omega t + \theta)\)
上面公式虽然复杂,但简而言之就是 \(f(t) = \frac{d}{dt} g(t) + g(t)\),如此看来它就是个一阶微分方程。求解就可得解。首先整理、微分;然后利用三角函数两角和对整个式子进行展开;最后求解:
\(U_{in}^{max} \cdot sin(\omega t) \\= RC \frac{d}{dt} (U_C^{max} \cdot sin(\omega t + \theta)) + U_C^{max} \cdot sin(\omega t + \theta) \\=RCU_C^{max} \omega cos(\omega t + \theta) + U_C^{max} sin(\omega t + \theta) \\ = RCU_C^{max} \omega (cos(\omega t)cos(\theta) – sin(\omega t)sin(\theta)) + U_C^{max} (sin(\omega t)cos(\theta) + cos(\omega t)sin(\theta)) \\ =RCU_C^{max} \omega cos(\omega t)cos(\theta) – RCU_C^{max} \omega sin(\omega t)sin(\theta) + U_C^{max} sin(\omega t)cos(\theta) + U_C^{max} cos(\omega t)sin(\theta) \\ = ( U_C^{max} cos(\theta) – RCU_C^{max} \omega ) sin(\theta) sin(\omega t) + ( RCU_C^{max} \omega cos(\theta) + U_C^{max} sin(\theta) ) cos(\omega t)\)分析系数,即可得到两个独立的方程:
(1)\(U_C^{max} cos(\theta) – RCU_C^{max} \omega ) sin(\theta) = U_{in}^{max}\)
(2)\(RCU_C^{max} \omega cos(\theta) + U_C^{max} sin(\theta) = 0\)
其中的方程(1)容端电压与源电压的关系式,暂时先不讨论。方程(2)是容端相位相对于源相位的关系是,求解此方程,即可知:\(\frac{sin \theta}{cos \theta} = RC \omega = tan \theta\)。
注:这里推导出问题了,应该是上面符号有错误,实际应该是\(\frac{sin \theta}{cos \theta} = \frac{1}{RC\omega} = tan (\theta)\)。
最终得到之前设定的 \(\theta = arc tan(\theta)\)。至此就可以看出来相位角的确存在,并且是与电路中的电阻、电容、电源频率存在关系的。
使用欧姆定律方法完成相位角的求解,可以避开复数概念的引入。整个过程更加的清晰,并且更加的直观。但是这一方法的弊端就是计算起来比较的繁琐,繁琐就容易出错。你看我就在推导过程中出错了不是?
其实有了这两个方法的理解,并且尝试了超前器的推导就已经足够理解RC相移得了。但是Jack·Kilby当年使用的是滞后器组成的移相网络,而且上面所有的推导都没有带入具体的R、C、f数值,因而下面再重复一遍,并且是带入具体数值进行计算。以便加深了解。
3.3、滞后器复数阻抗计算法:
上面已经完成了超前器的相移角计算,接下来再计算一下滞后器,因为超前和滞后几乎没有任何区别,因而没有必要再重复一遍上面的推论,直接带入具体的数值计算即可。
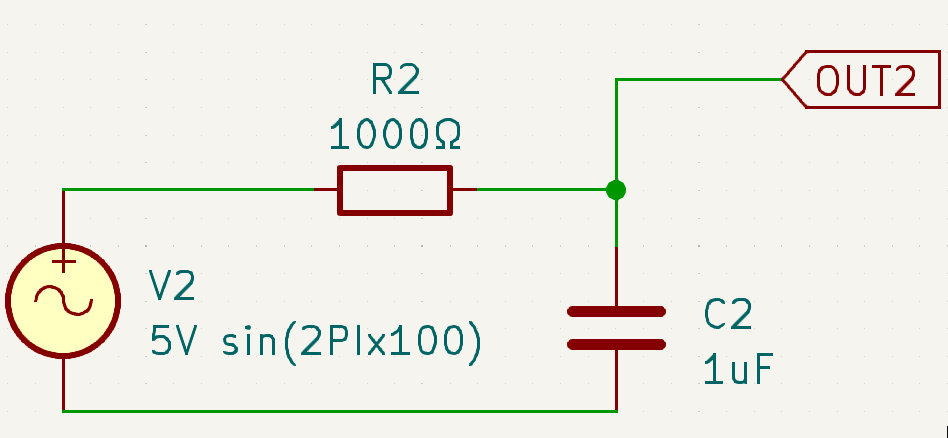
首先计算电路中的阻抗(阻抗=电阻+容抗)。
电阻 \(R = R_R = 1000Ω\)
电抗 \(X_Z = X_C = j \frac{1}{\omega C} = j \frac{1}{2 \pi \cdot 100 \cdot 10^{-6}} Ω\)
相位角 \(\theta = arc tan(\frac{Im}{Re}) = arc tan(\frac{5}{\pi}) = 57.87°\)
这个角度虽然接近60°,但是在100Hz的电源发生器作用下,并非完美的60°。如果想得到一个完美的60°移相,则可以利用上面的计算式,翻转往回计算。例如固定频率、电阻,期望得到60°移相,则可以反推回需要的电容容值是多大。
期望得到的相移角度 \(\theta = 60°\)
即 \(\theta = arc tan(\frac{Im}{Re}) = 60°\),那么 \(\frac{Im}{Re} = tan(\frac{\pi}{3}) = \sqrt{3}\)
由此往回倒推可知需要电路中的容抗 \(Im = \sqrt{3} \cdot Re = 1000 \sqrt{3}\)
进而根据关系式 \(\frac{1}{2\pi 100 C} = 1000\sqrt{3}\)
最终确定选用的电容容值 \(C = \frac{1}{2\pi 100 \cdot 10^3 \sqrt{3}} = 0,919uF\)
3.4、滞后器微分方程求解法:
已知电阻、电容、角速度的前提下,直接使用3.2得出的结论计算,相位角是 \(\theta = arc tan(\frac{1}{\omega R C} = arc tan (\frac{1}{2\pi 100 \cdot 1000 * 10^{-6}}) = arc tan (\frac{5}{\pi}) = 57.87°\)
这与3.3通过复数方式得到的结果是一致的。至于期望目标相移、反推器件参数,就不再额外记录了。最后给出使用0.919uF电容以期获得近乎完美的60°移相的仿真,为了便于观察,使用三组移相器串联,这样就能看出输入波形与输出波形是呈现180°相位差的了。
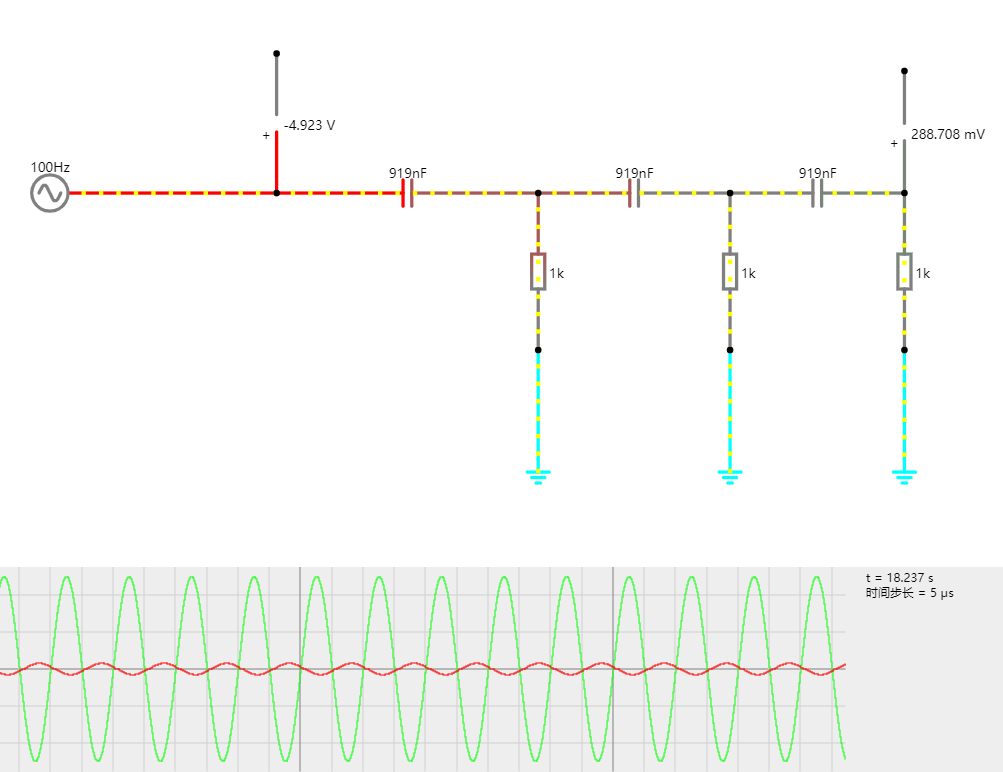
当然还可以使用6组,获得360°相位差,这样观察起来更加的直观,因为输入输出的正弦会出现相位重合。但是之所以不做6组串联观察,是因为经过多次RC相移,输出电压的峰值会越来越低、最后趋于“毫无波澜”,反而看不出结论。
至于每次经过RC相移器之后电压峰值损失,恰是上面3.2中微分方程求解时获得的第一个方程式所能体现出来的,这将在之后再慢慢推敲。